Ca y est, je viens de terminer la mise au point de la première version de mon « Arduino PhotoLab », derrière ce nom se cache un petit circuit fait maison qui permet de piloter mon EOS 400D pour prendre des photos à haute vitesse ( goutte d’eau, orage, bris de verre…).
Voilà un exemple de mes tests du jour avec de gouttes d’eau et d’huile:



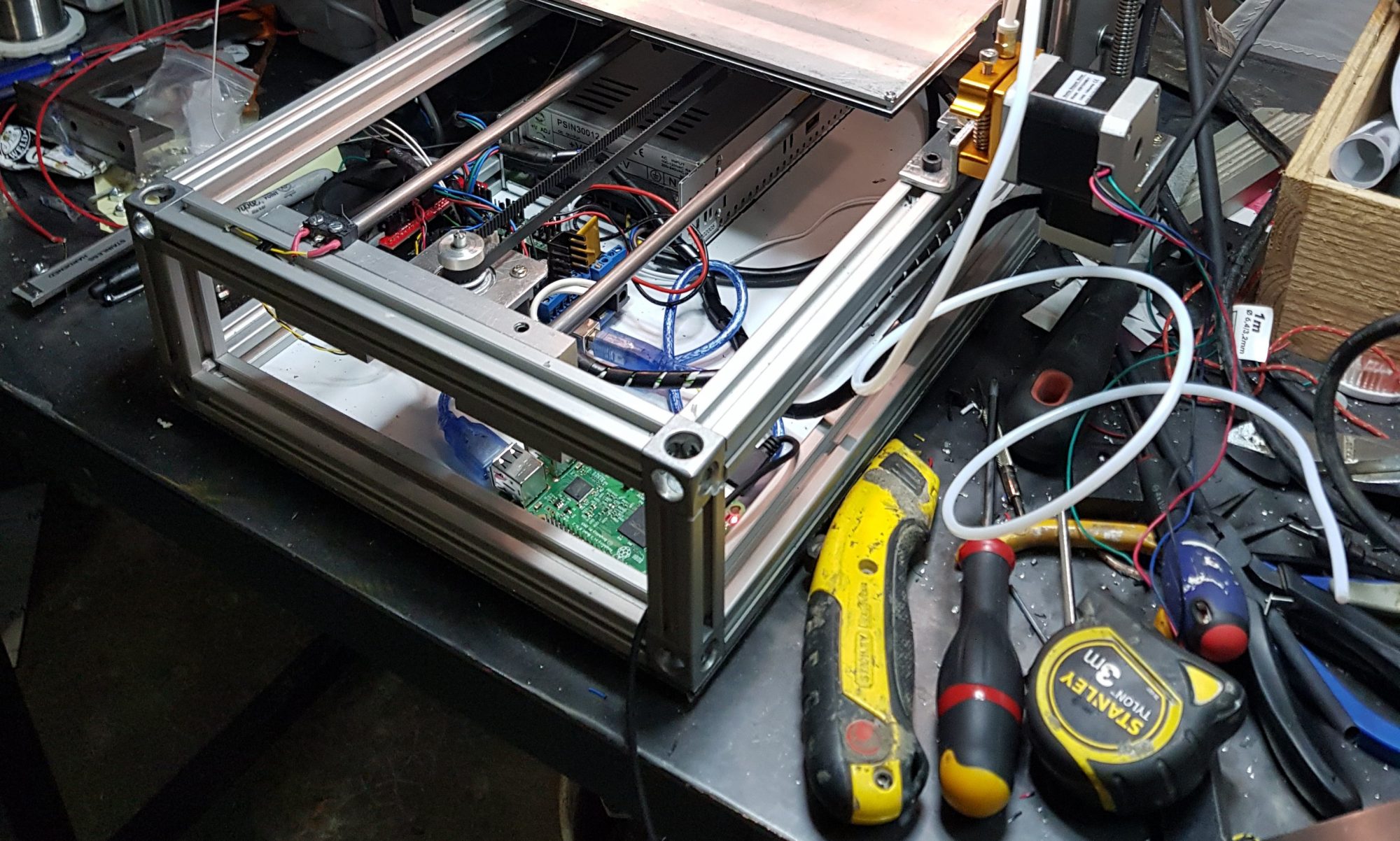
Le cœur du circuit est un ATMEGA 168 avec le firmware Arduino. Le boitier dispose d’une LED de contrôle, d’un écran LCD pour le paramétrage et de 4 boutons.

L’intérieur de la boite. C’est mal rangé mais ça marche 😉

Le boitier dispose de 5 entrées / sorties:
- un port série pour mettre à jour le firmware
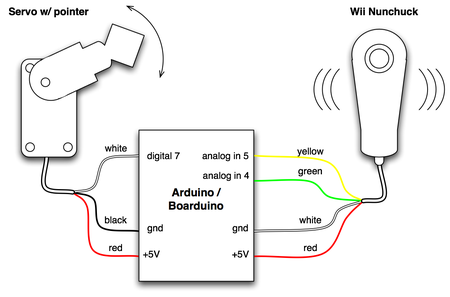
- une sortie pour le premier servomoteur
- une sortie pour le deuxième servomoteur
- une sortie pour une commande de flash
- une entrée pour un capteur analogique. actuellement j’ai fait 3 capteurs: un de contact, un capteur sonore et un capteur IR.

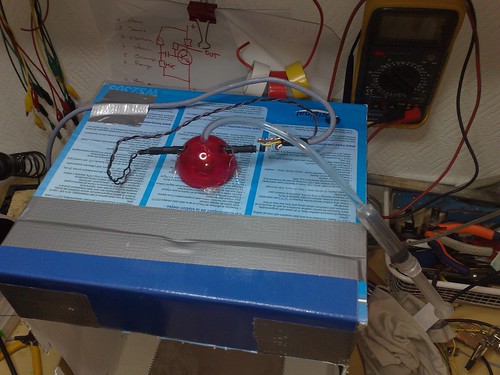
Voilà la zone de test :-). J’ai fabriqué une boite en carton peinte en blanc pour la prise des photos. Un goutte est projetée avec une seringue, lors de la traversée de la demi-sphère rouge, elle est détectée par une barrière IR. Le PhotoLab attend alors un délai réglable (ici 305ms) avant de déclencher le flash.

Principe de fonctionnement:
- On place la pièce dans le noir.
- L’appareil photo est déclenché manuellement avec une télécommande. Il est paramétré pour une pose de 4 seconde. Le temps de faire tomber une goutte.
- On appuie sur la seringue pour lacher une goutte.
- La goutte est détectée. le photolab attend quelques milli secondes.
- Le flash est déclenché. Il illumine la pièce et fige la photo.
- Les 4 secondes sont écoulées, l’appareil photo referme l’obturateur.
Le système est assez basique actuellement mais ça fonctionne, j’arrive a prendre en photo trois gouttes sur cinq à peu près. Par la suite, de simple mise à jour du logiciel me permettront de contrôler 2 servomoteurs pour effectuer de grosses photos panoramiques automatiquement. J’ai commandé 2 servos d’une puissance de 10Kg pour ça 😉
Si ça intéresse quelqu’un, je peux mettre le schéma en ligne (enfin il faut d’abord que je le fasse…).