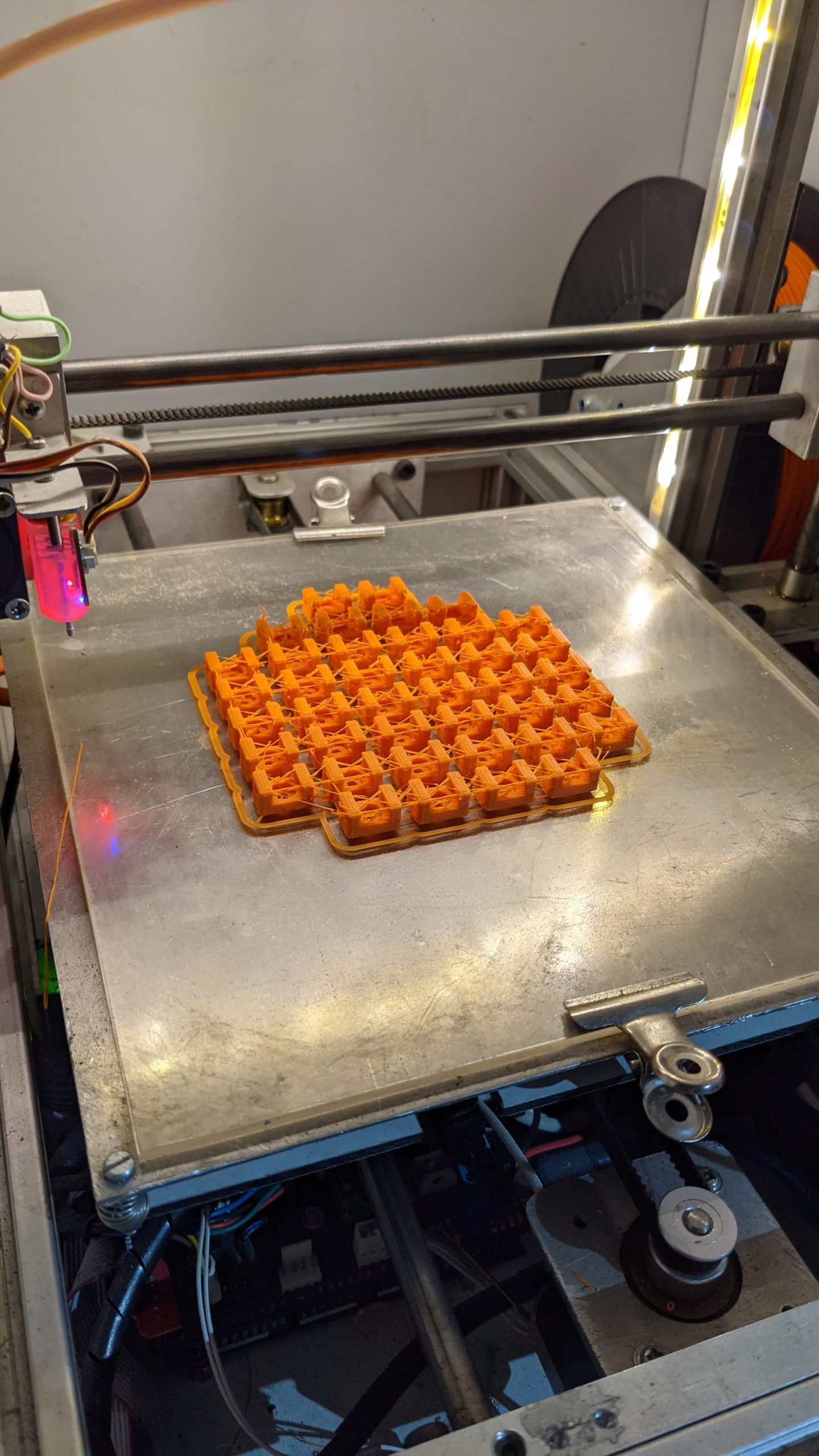
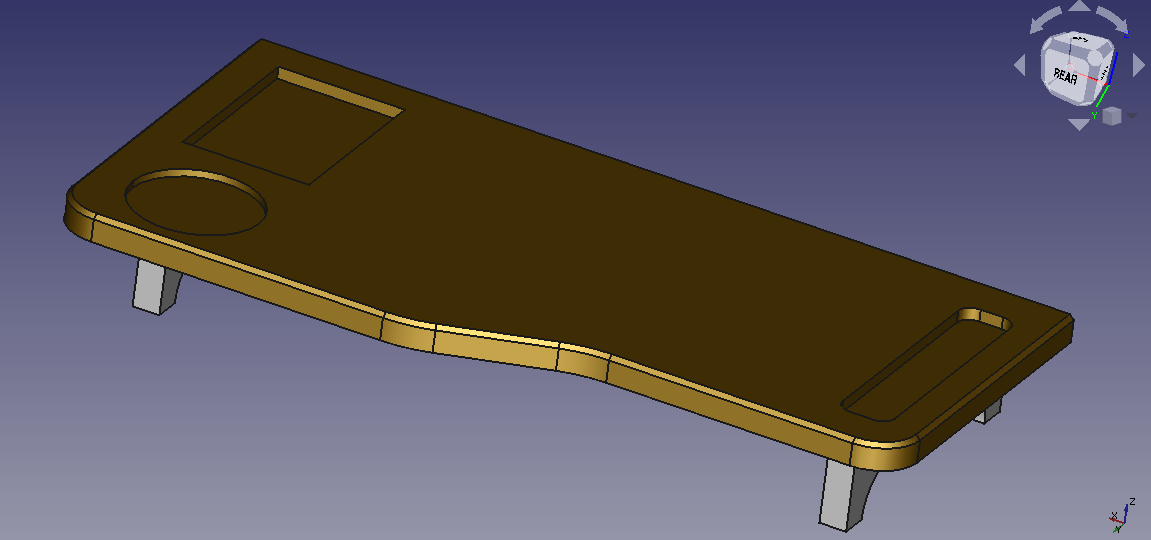
Voici quelques photos de projets réalisés à l’aide de la CNC.
Un support d’écran réalisé en pin. Dessiné sur Freecad.
Une planche à découper
Des planches à pain de taille différentes. La grille est amovible pour faciliter le nettoyage des miettes.
Une belle lampe déco réalisée en chêne massif avec son interrupteur lui aussi en chêne et aluminium. Dessinée avec Freecad.
Lampe déco
Plusieurs tableaux réalisés en diverses essences de bois et résine époxy. Une première pour moi, mais un résultat à la hauteur de mes espérances. Gravure réalisée avec inkscape et dmap2gcode. Le laser est géré à l’aide de Lightburn.
Le golf du Morbihan
Quelques projets de déco ou de rangement
Un tableau « Vélo »Des rangements pour la DremelRangement pour boucles d’oreillesUn porte braceletsSupport de sabreSceau à cire
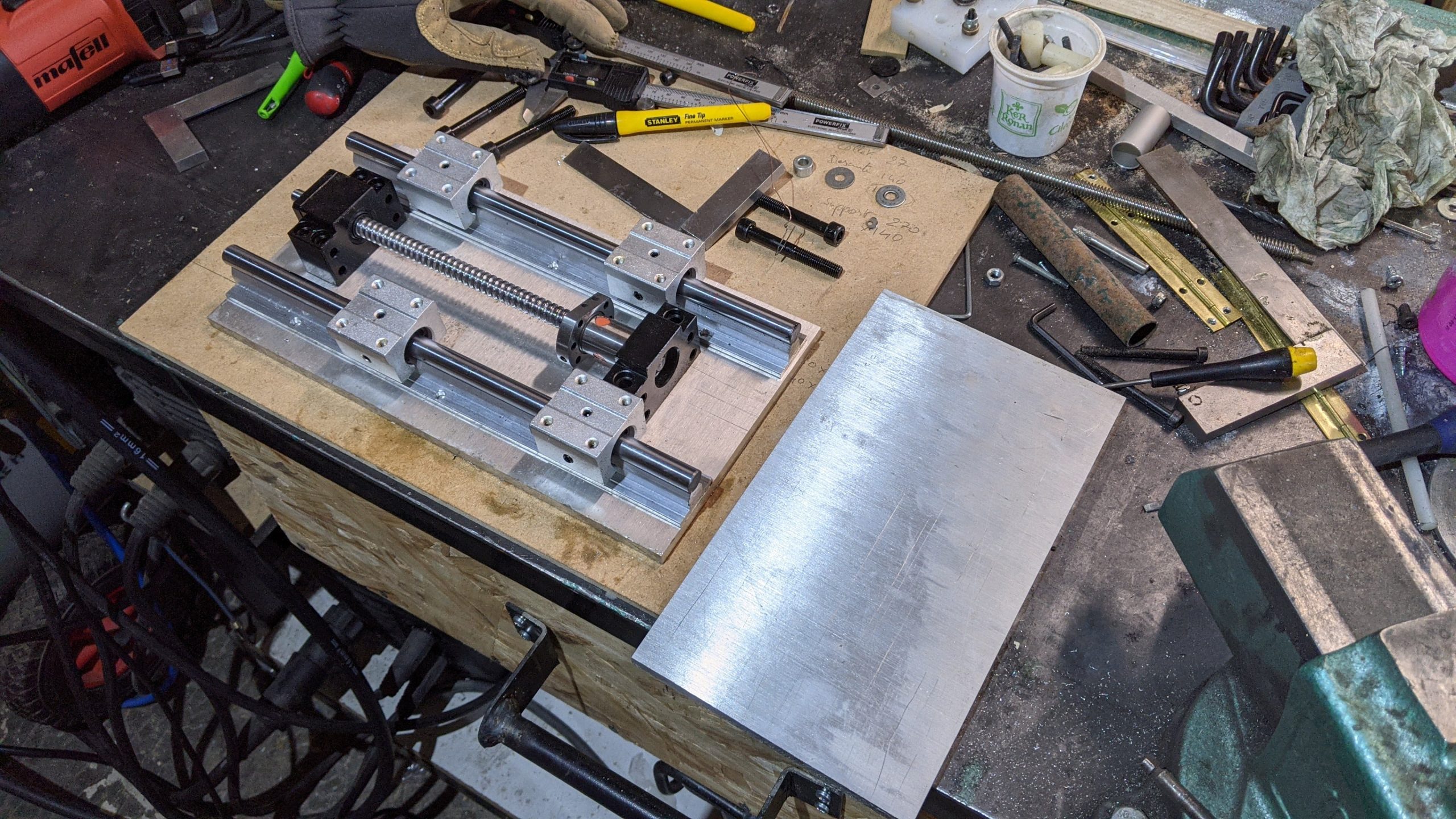
J’ai démarré il y a quelques temps un projet de fraiseuse numérique plus puissante et avec une surface utile plus importante que la précédente. J’ai quelques contraintes: un budget le plus serré possible, la réutilisation de tout ce que je possède déjà. Me voilà parti en quête de profilés d’aluminium. Avec chance, j’ai trouvé mon bonheur chez un ferrailleur, pour quelques dizaines d’euros, j’ai pu repartir avec quelques profilés alu de grosse section ainsi qu’une grande feuille d’alu de 8mm. Ce sera la base de la machine, j’y ajouterai quelques morceaux de tube d’acier de 30×40 pour assembler les rails en aluminium.
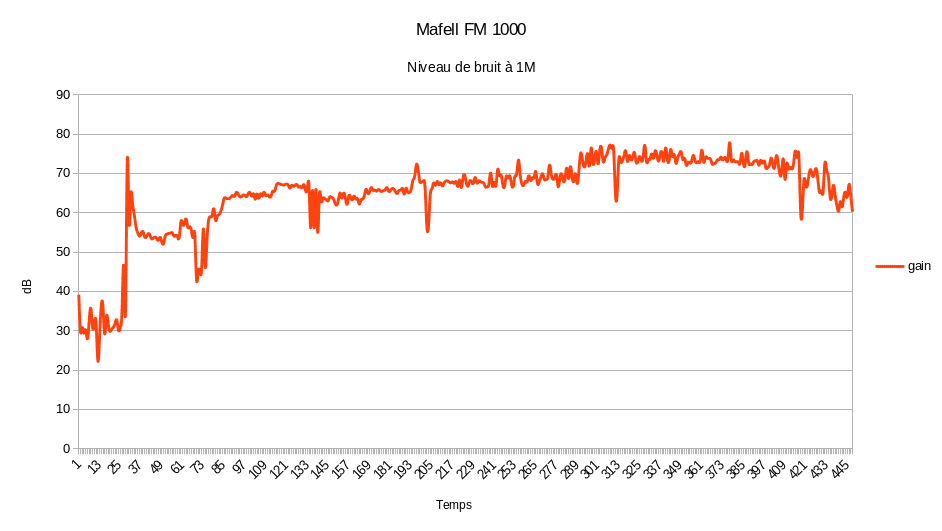
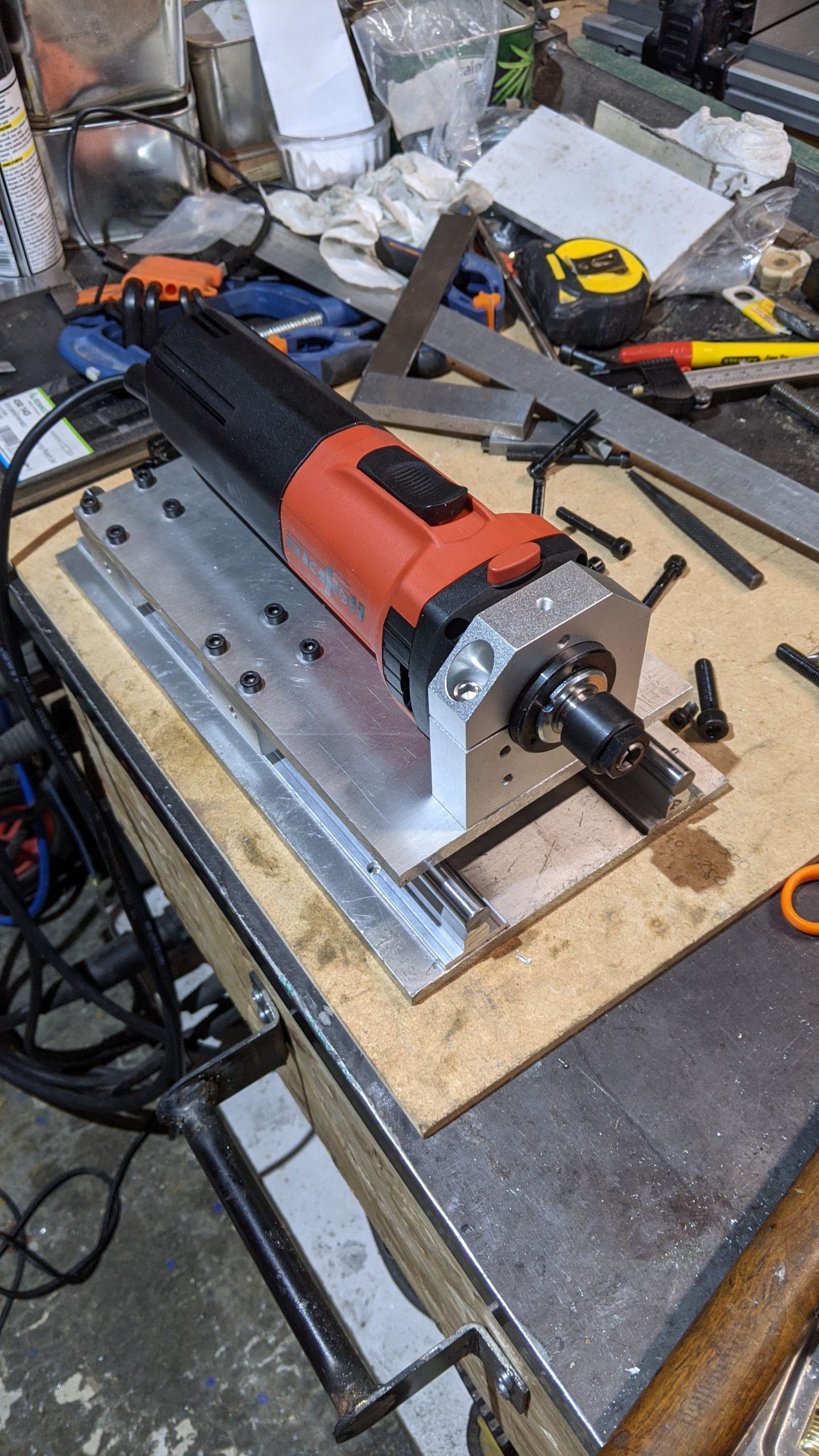
Pour ce qui est de la broche, après une longue hésitation entre les broches classiques allemandes et les chinoises, je suis parti sur une Mafell FM1000, simple précise et robuste. Je craignais un peu le bruit d’une broche refroidie à l’air mais finalement, c’est tout à fait raisonnable, le bruit de la fraise qui attaque la matière couvre largement le bruit de la broche. Et j’évite aussi l’encombrement et la relative complexité d’un refroidissement liquide sur les broches chinoises.
Voici une mesure du niveau de bruit de la broche. La mesure est prise à 1m avec mon téléphone. J’ai augmenté progressivement la vitesse de 5000 à 22000 tours par minute.
Je n’ai pas de plan pour la construction, je fais tout au fur et à mesure en adaptant au matériel / outillage dont je dispose. Je commence donc le projet par l’axe Z. On verra plus tard que celui-ci évoluera à cause d’un manque de rigidité. Les vis à billes sont d’origine chinoise.
Des morceaux de la fameuse feuille d’alu de 8mmPlus tard les vis seront remplacées par des têtes fraiséesL’axe Z prend forme progressivement
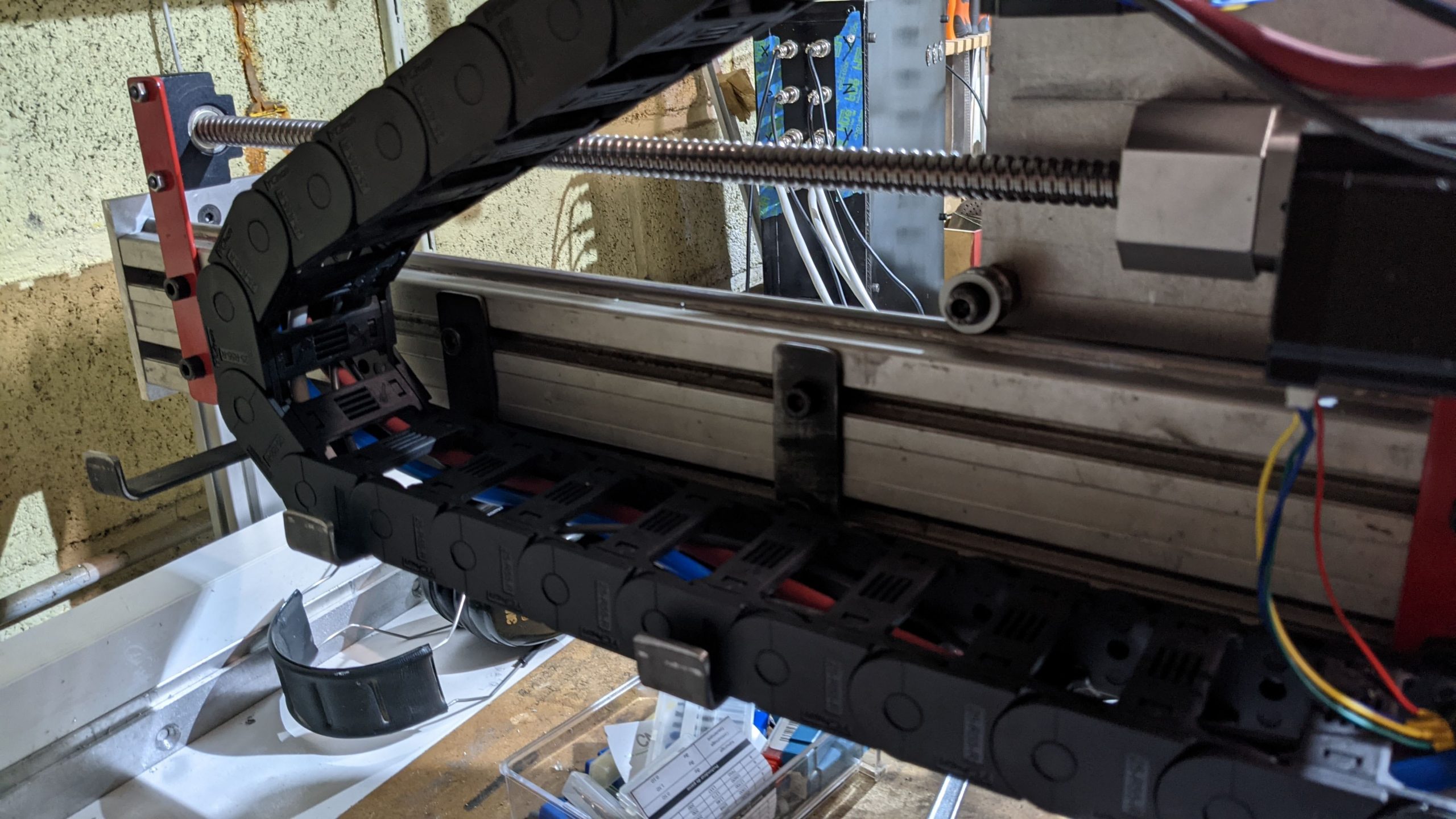
Le guidage linaire des axes X et Y sera réalisé directement à partir des profilés en aluminium. Un rond d’acier stub de 12mm sera collé les rainures hautes et basse de chaque profilé. Un roulement en U viendra glisser sur ce guide. C’est un système simple, très rigide, économique. Le seul inconvénient vient de l’exposition des rails à la poussières, par contre le nettoyage et très facile, un coup de chiffon et c’est propre. On verra par la suite que des protections peuvent être ajoutées.
Le système de roulementle principe général: un roulement et un support excentriqueTest de positionnement de ZUn barreau hexagonal sert à la fabrication des excentriquesl’axe Z est libre de coulisserLes ronds d’acier stub sont collés sur les profilés avec de la colle PULes futurs excentriques
Pour régler les jeux et assurer un positionnement précis, les axes des roulements en U sont montés sur un excentrique formé à partir d’un barreau de 17 mm. On peut ainsi régler l’assiette de chaque axe et réduire les jeux pour avoir un coulissement doux des différents axes.
Mise en presse pendant le collage
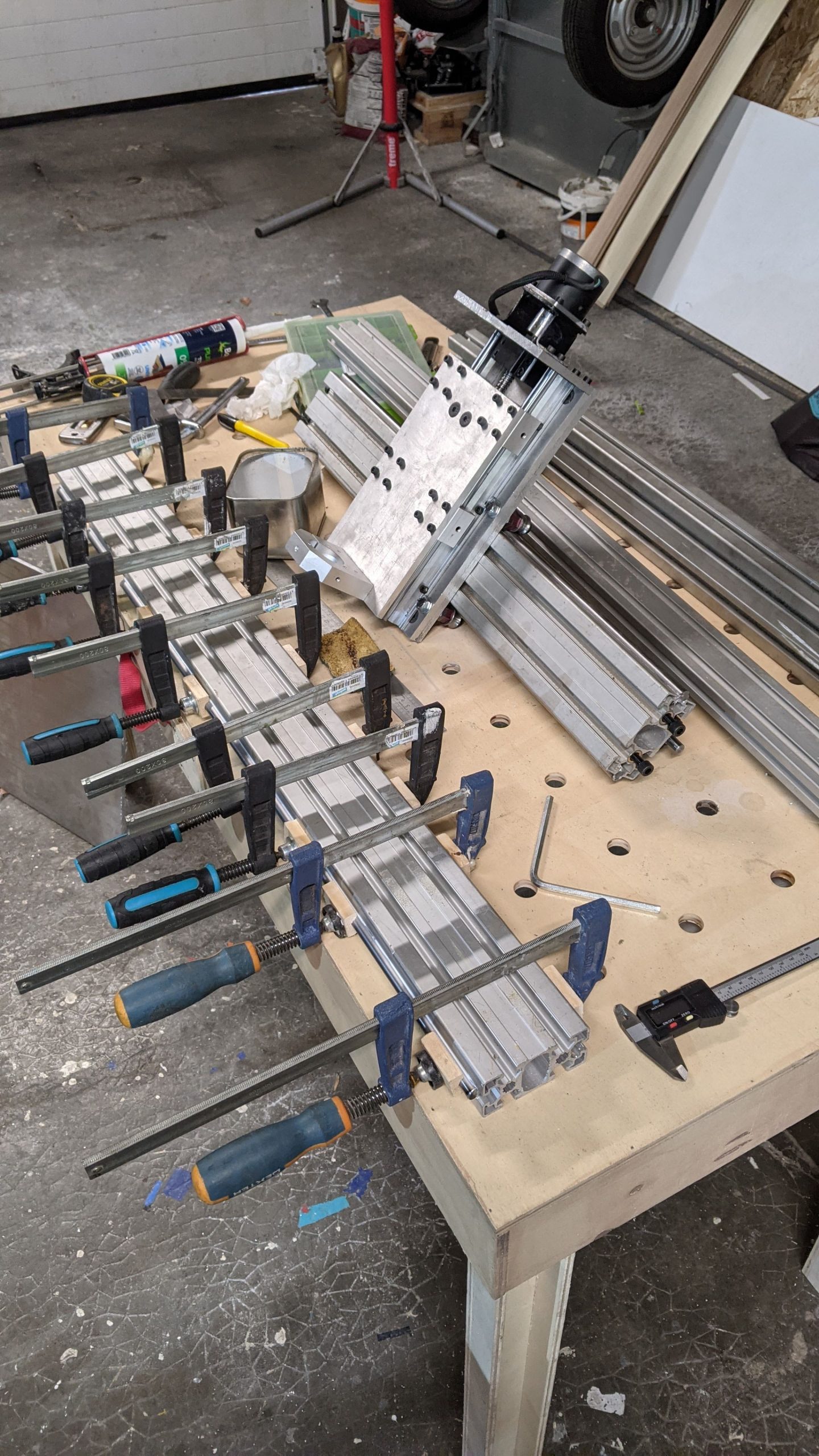
Vient ensuite l’assemblage de la structure. J’insère des rivets à vis qui sont écrasés / collés. Pas tout à fait l’usage prévu mais ça fonctionne bien comme ça.
Des traverses en acier sont fabriquées et soudées pour solidariser les 2 axes Y qui constituent la base de la machine.
Contrôle de la planéité à l’ancienneUne machine en kit 🙂ça commence à ressembler à quelque-chose
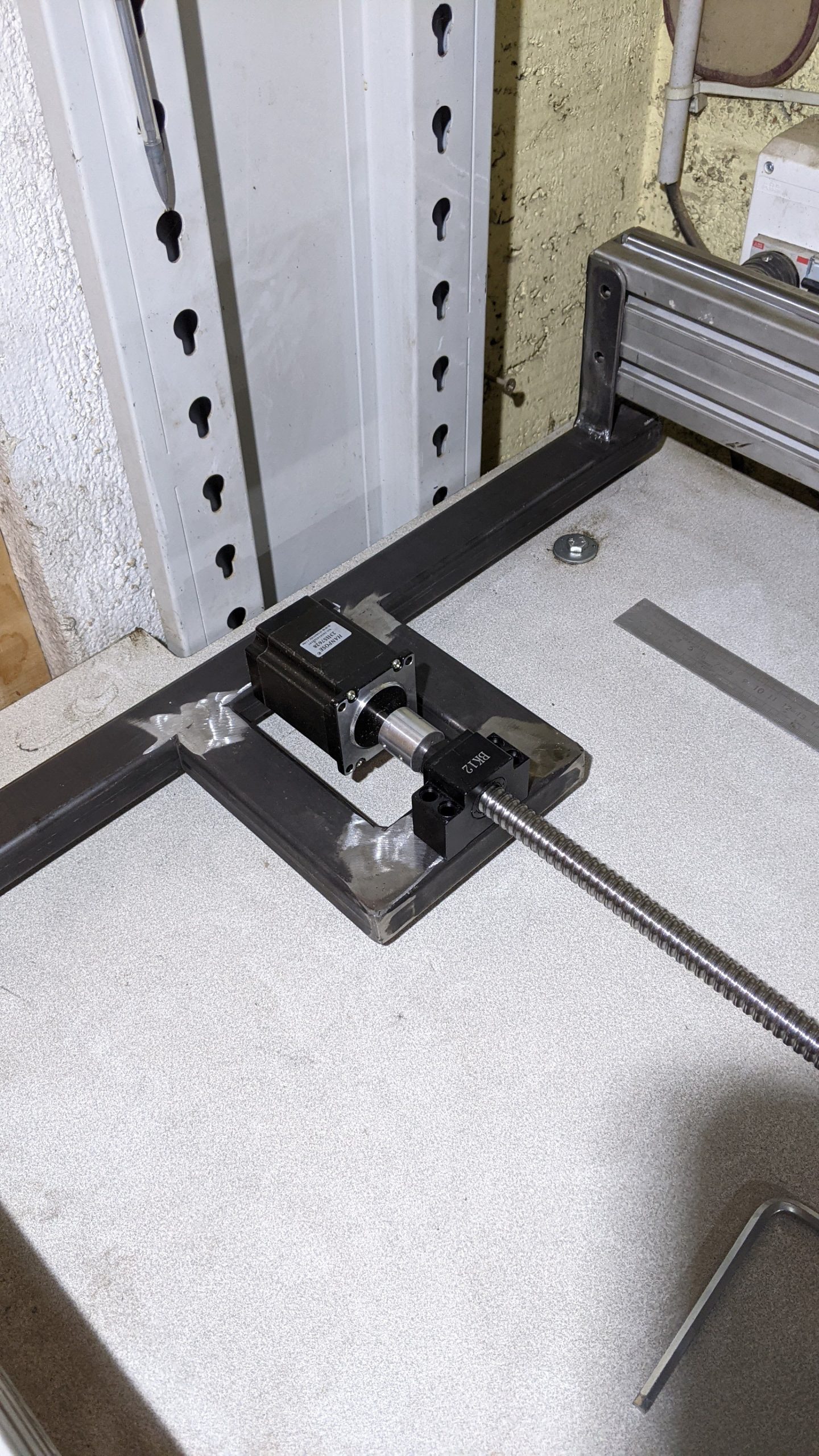
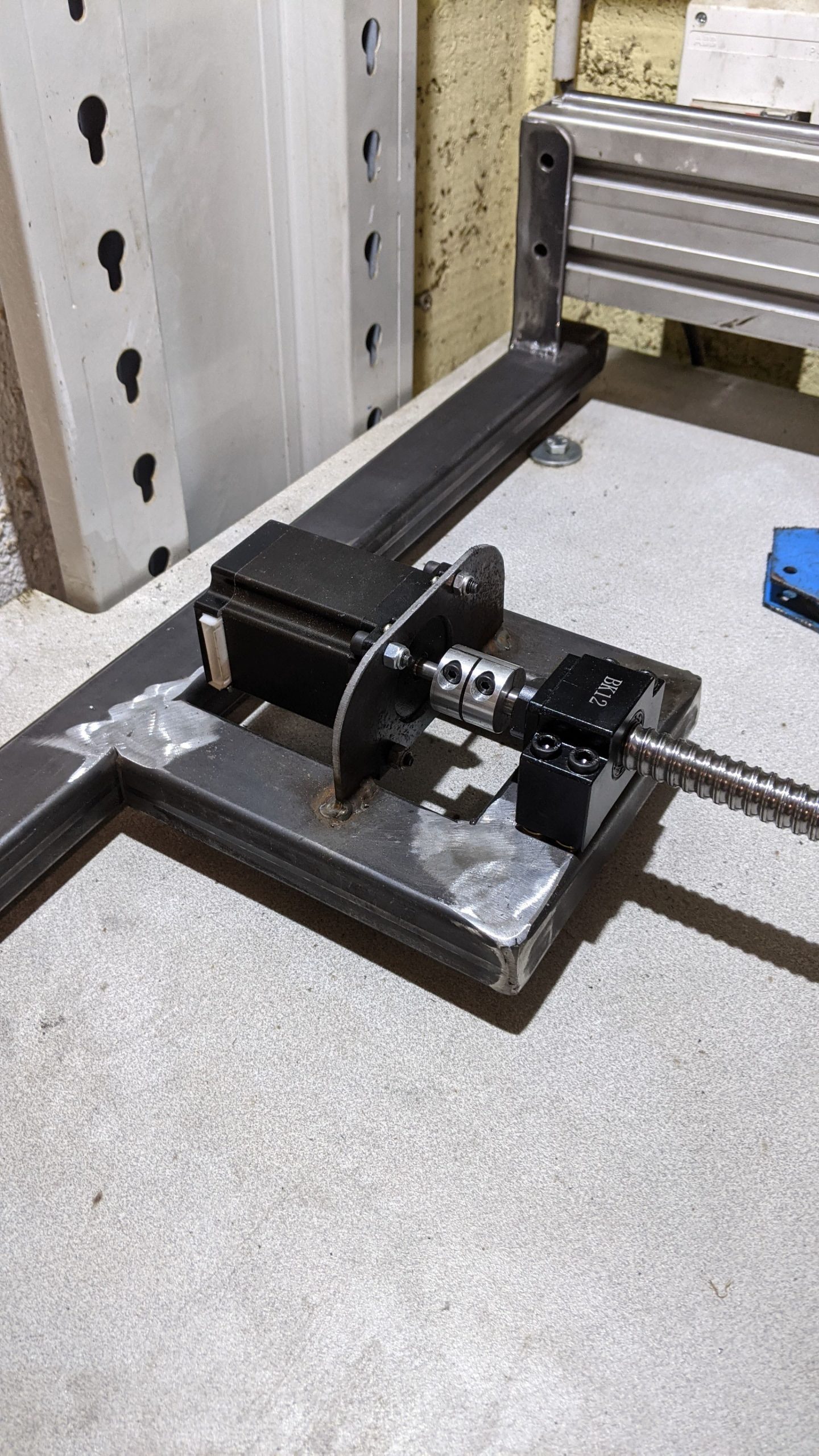
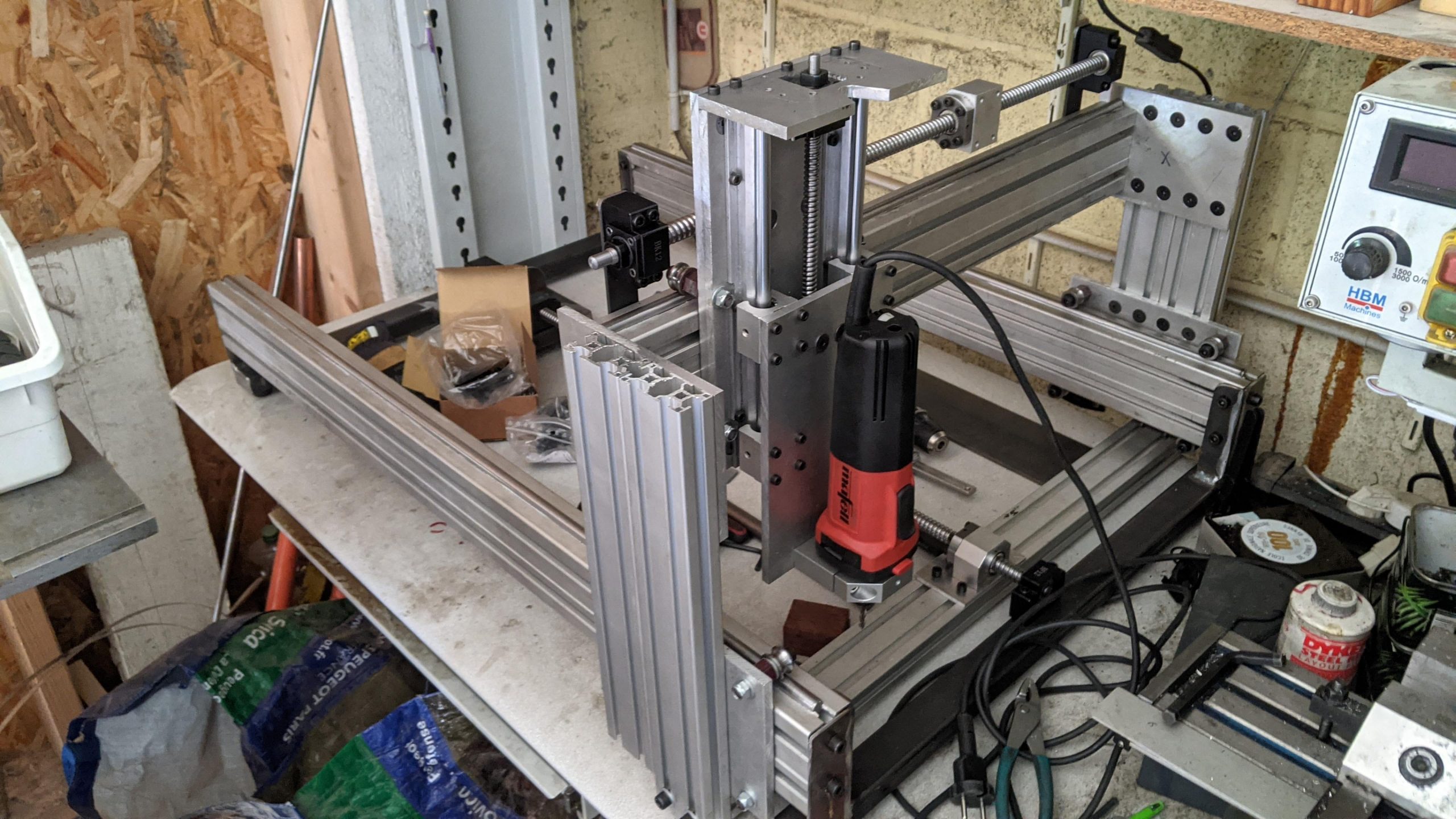
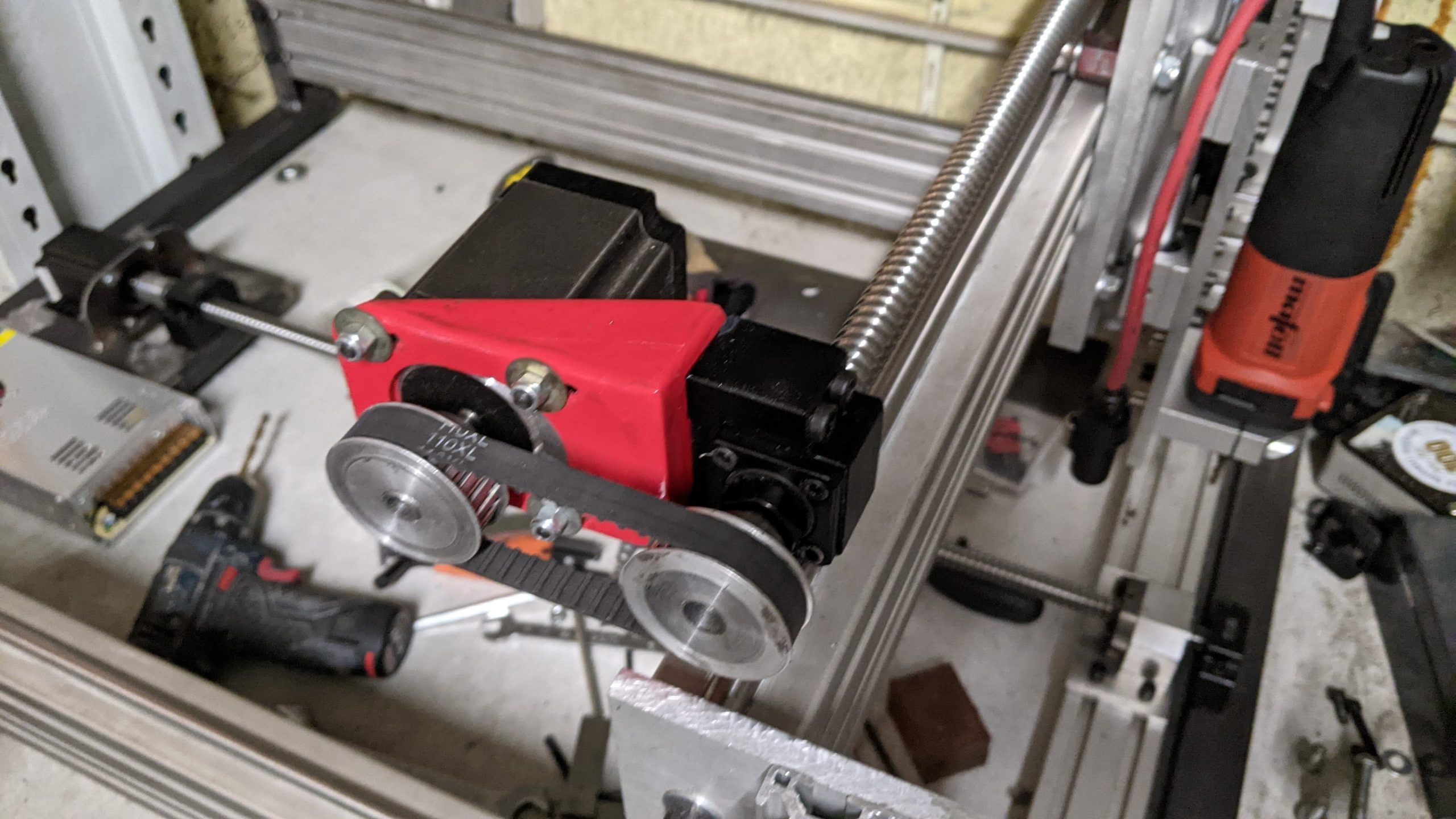
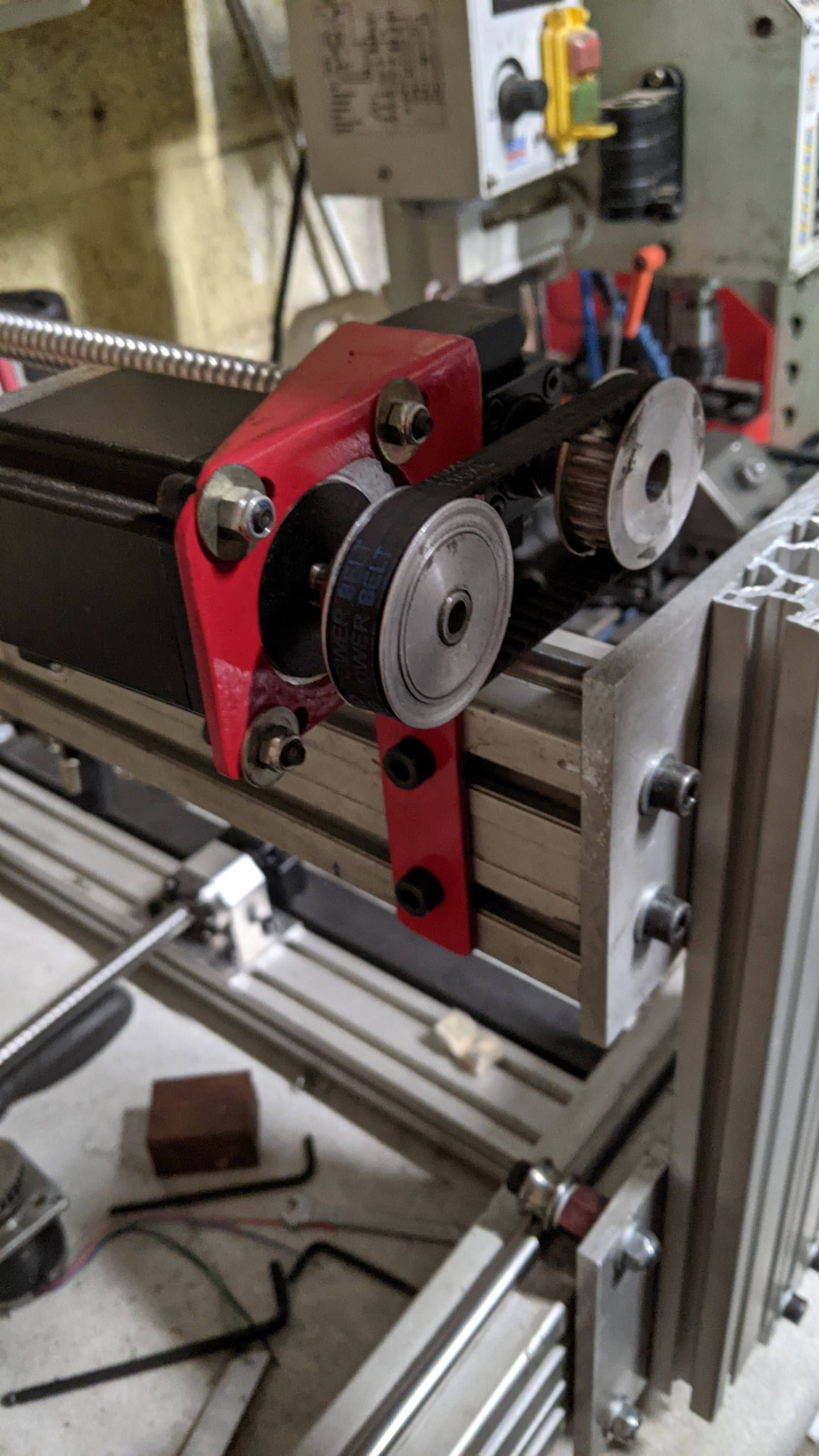
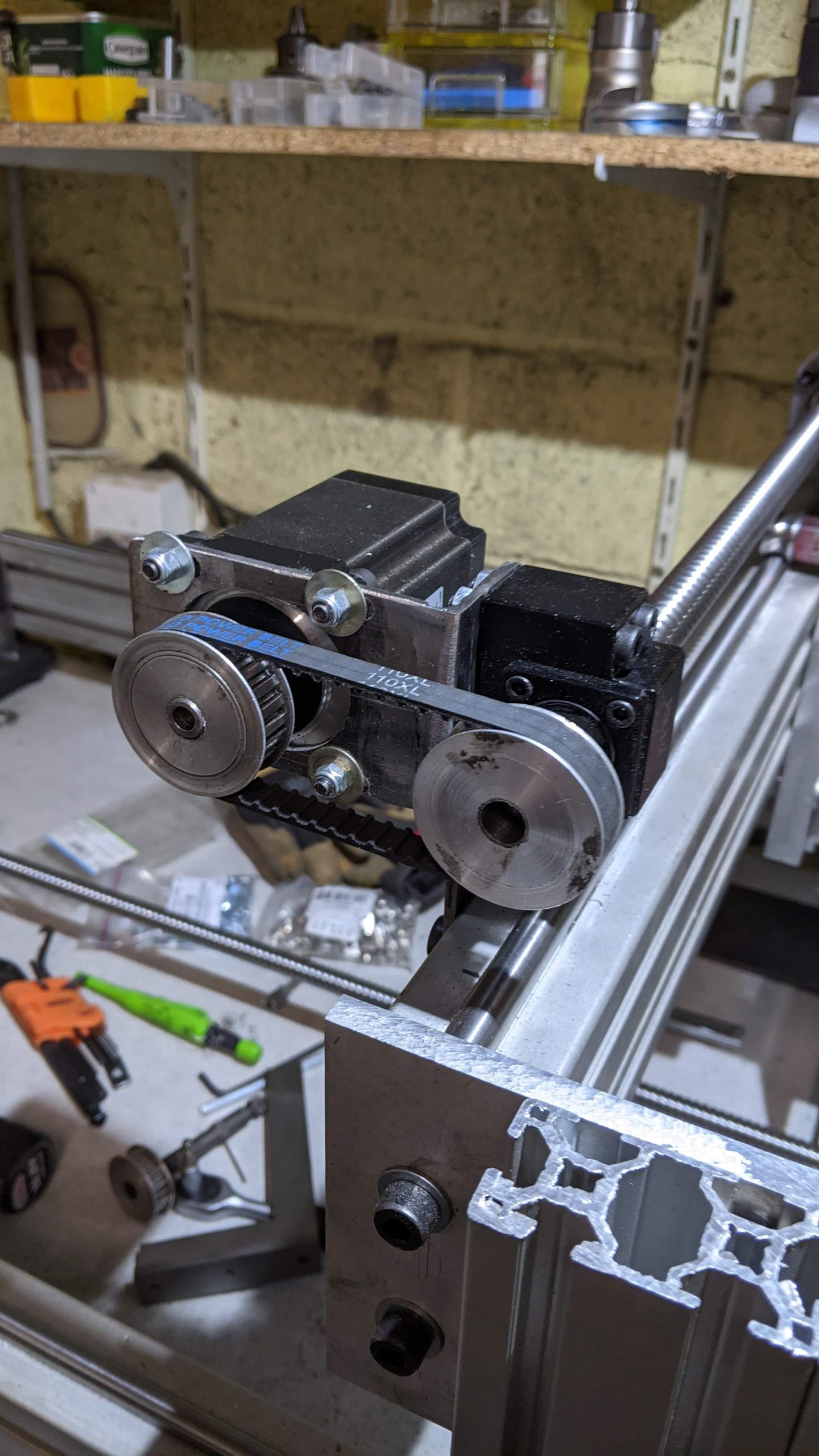
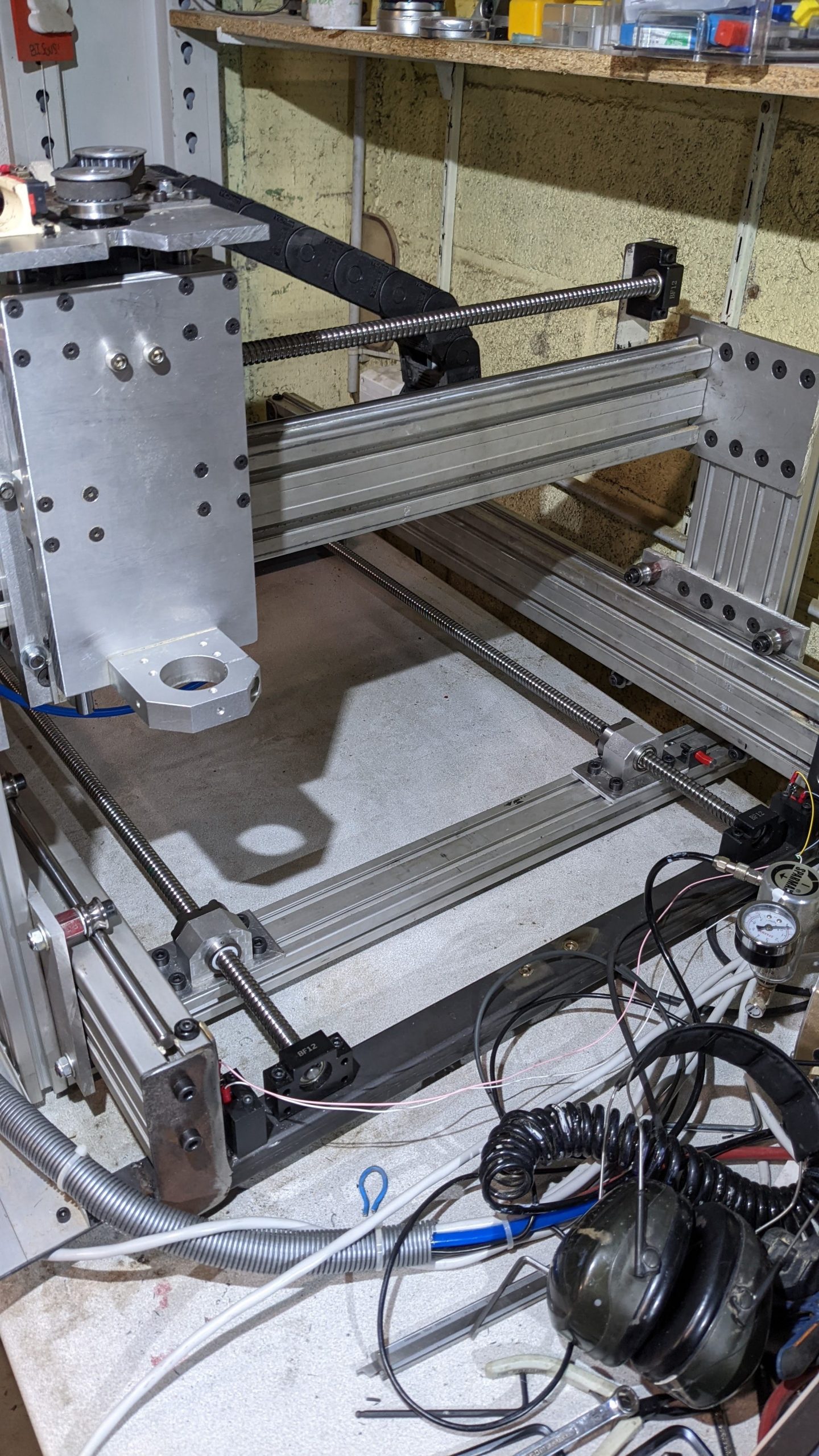
L’étape suivant c’est l’installation des vis à bille et des supports moteur. Je vais tout d’abord installer une vis centrale pour Y mais ça s’avérera être une erreur, les 600 mm de l’axe X imposent trop de contraintes et la rigidité n’est pas au rendez-vous. J’ajouterai par la suite une deuxième vis sur cet axe ce qui permettra en plus de réaliser un équerrage automatique avec les capteurs de fin de course.
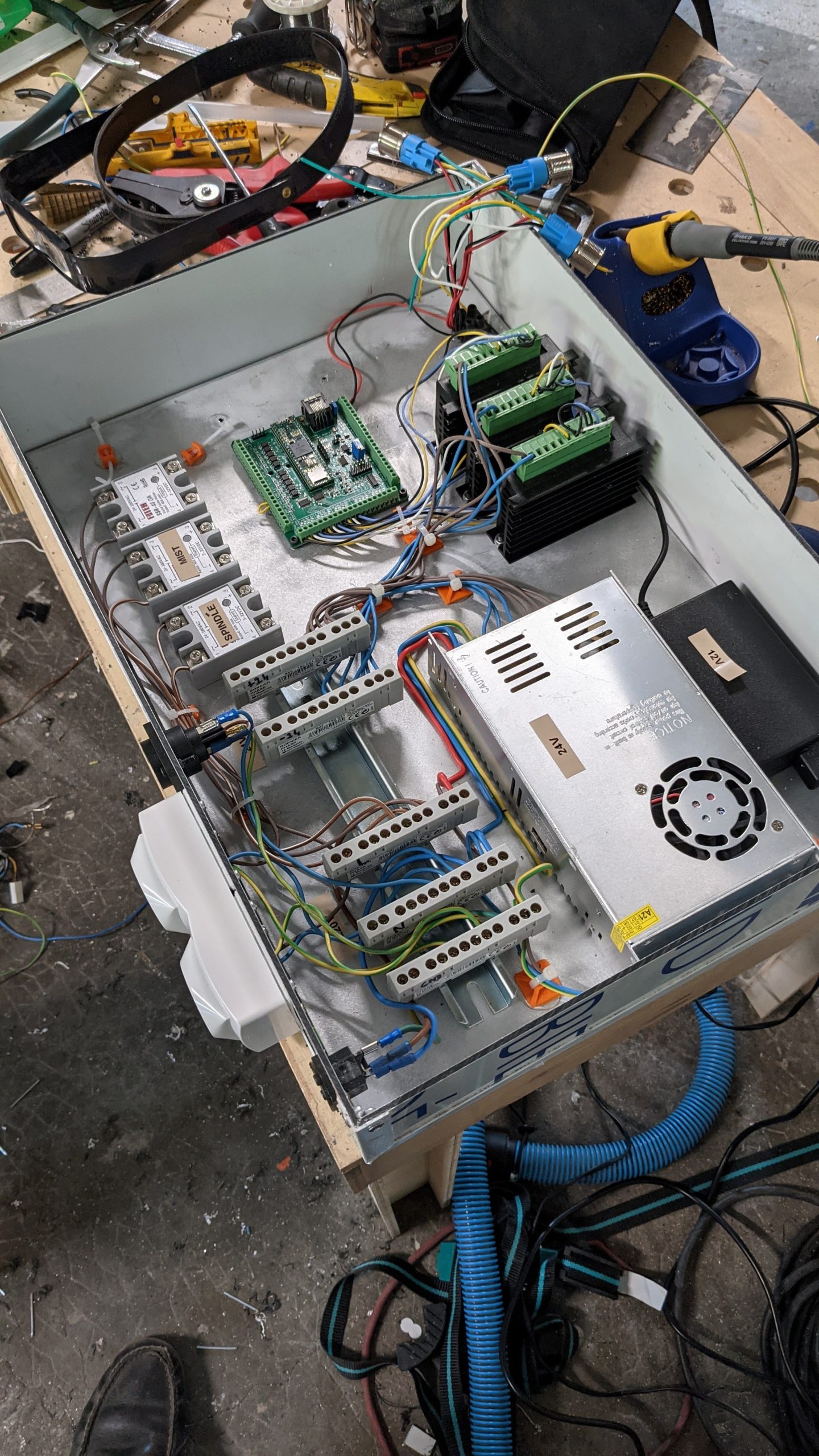
La partie mécanique touche à sa fin ou presque, maintenant c’est au tour de l’électronique de commande. La carte retenue est basée sur un contrôleur Teensy 4.1. Elle est d’excellente facture et dispose de toutes les connexions nécessaires au projet. Vous pouvez la trouver ici: https://hackaday.io/project/175209-teensy-41-cnc-controller
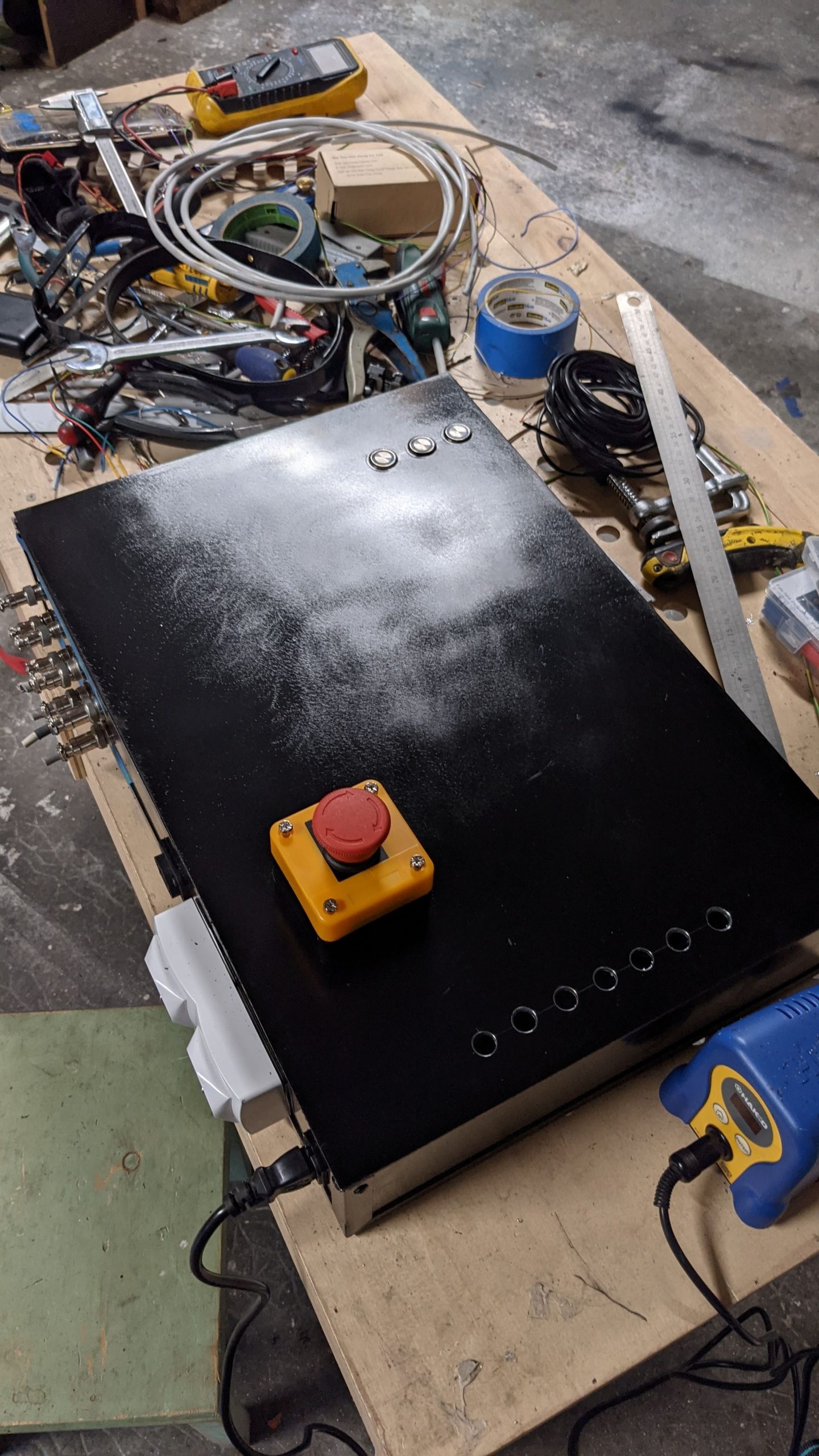
Elle est d’ailleurs 100% opensource ! et propose une interfae de type GRBL HAL compatible avec de nombreux logiciels de commande. Le boitier est réalisé avec des plaques de dibon de récup.
La carte de commandeImpression de supports pour les câbles Premiers testsC’est dense mais ça rentreLe boitier plus ou moins finalisé
Comme je l’expliquais précédemment , des protections contre la poussière sont ajoutées sur les rails Y les plus exposés.
Quelques détails supplémentaires, avec l’installation de chaines « guide câble », de quelques supports et d’un système d’aspiration des poussières.
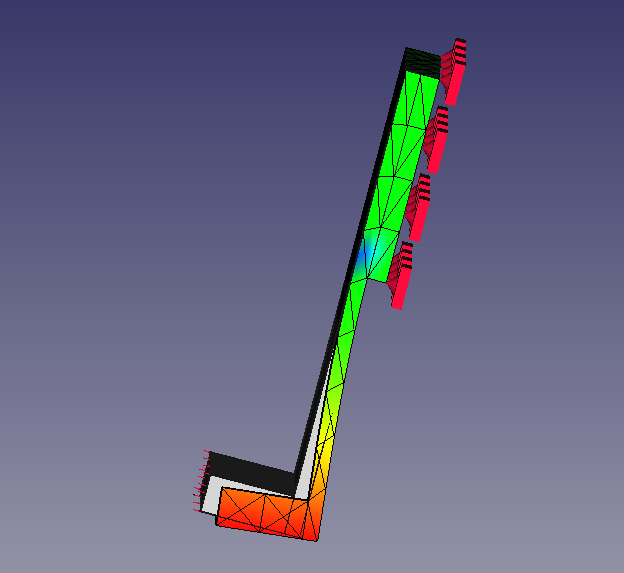
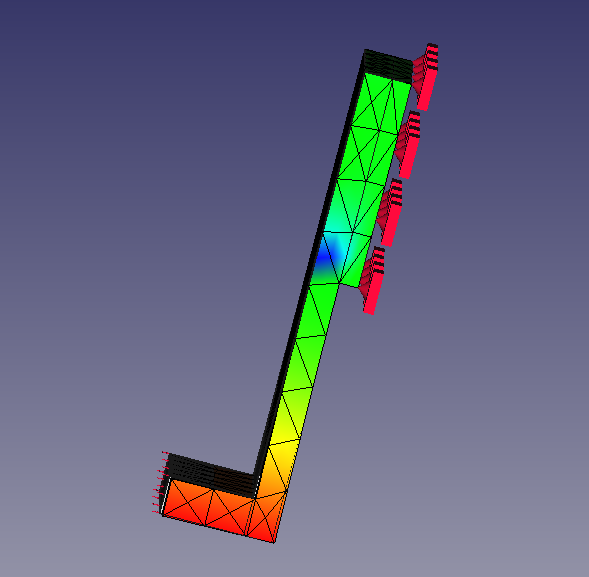
Après les premiers tests, il s’avère que le support de Z en 8mm est insuffisant, il sera remplacé par un de 15 mm plus rigide. Comme le montre cette simulation réalisée avec freecad, la différence est notable !
8 mm15 mm
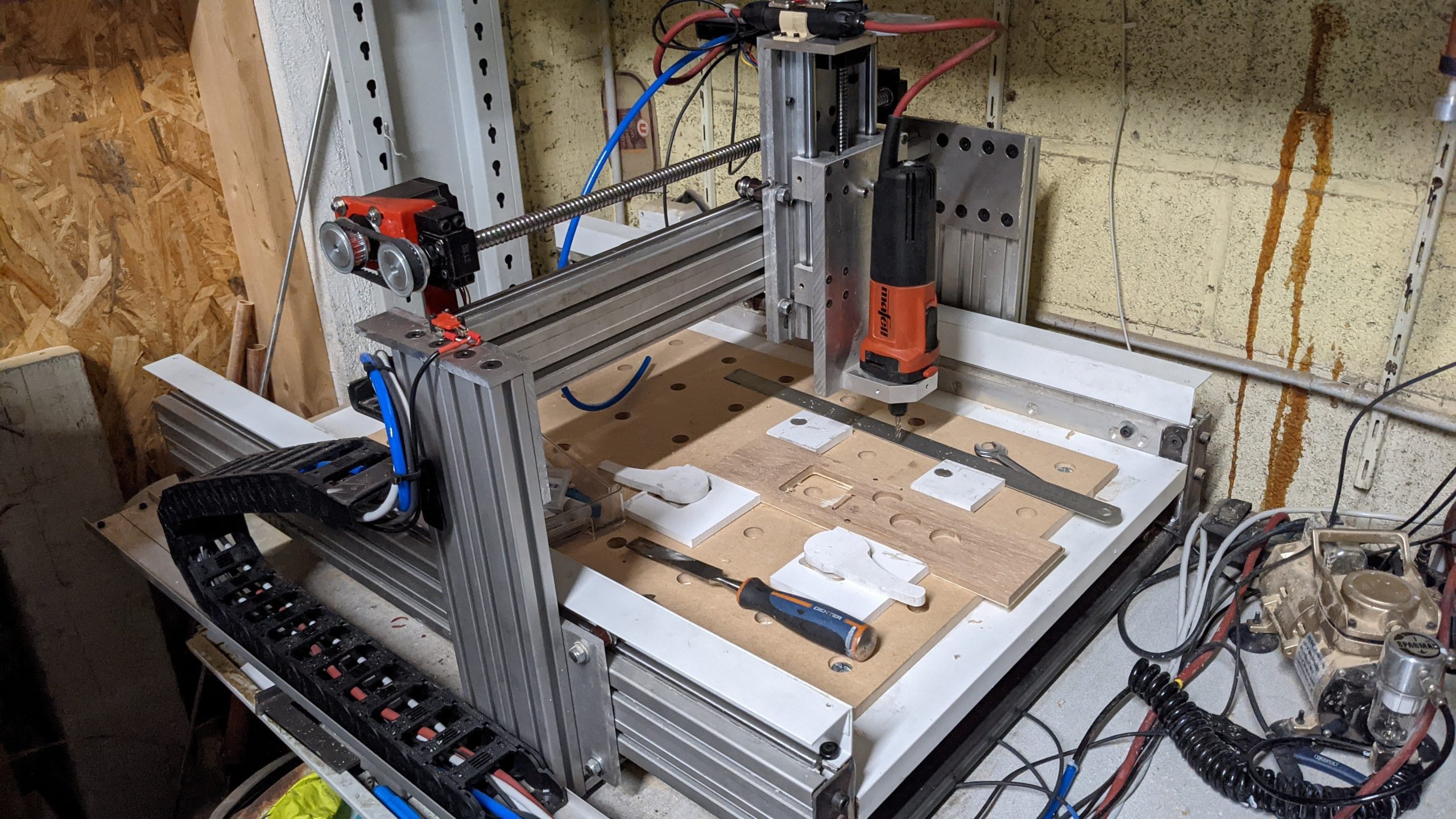
La construction de la machine touche à sa fin. Comme expliqué un peu plus haut, j’ajoute une deuxième vis sur Y. Ce qui permet d’activer un équerrage automatique parfaitement supporté par la carte de commande.
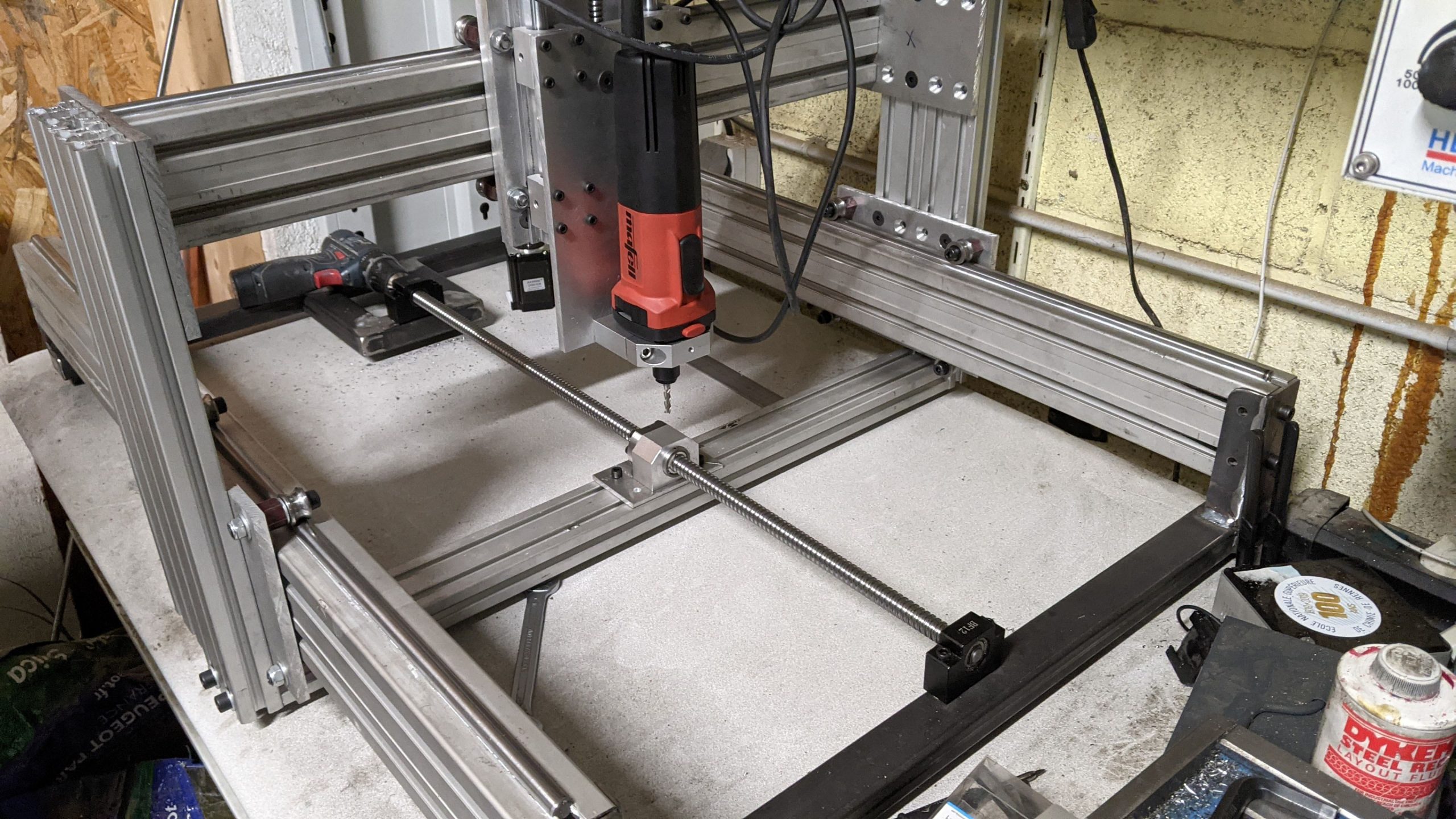
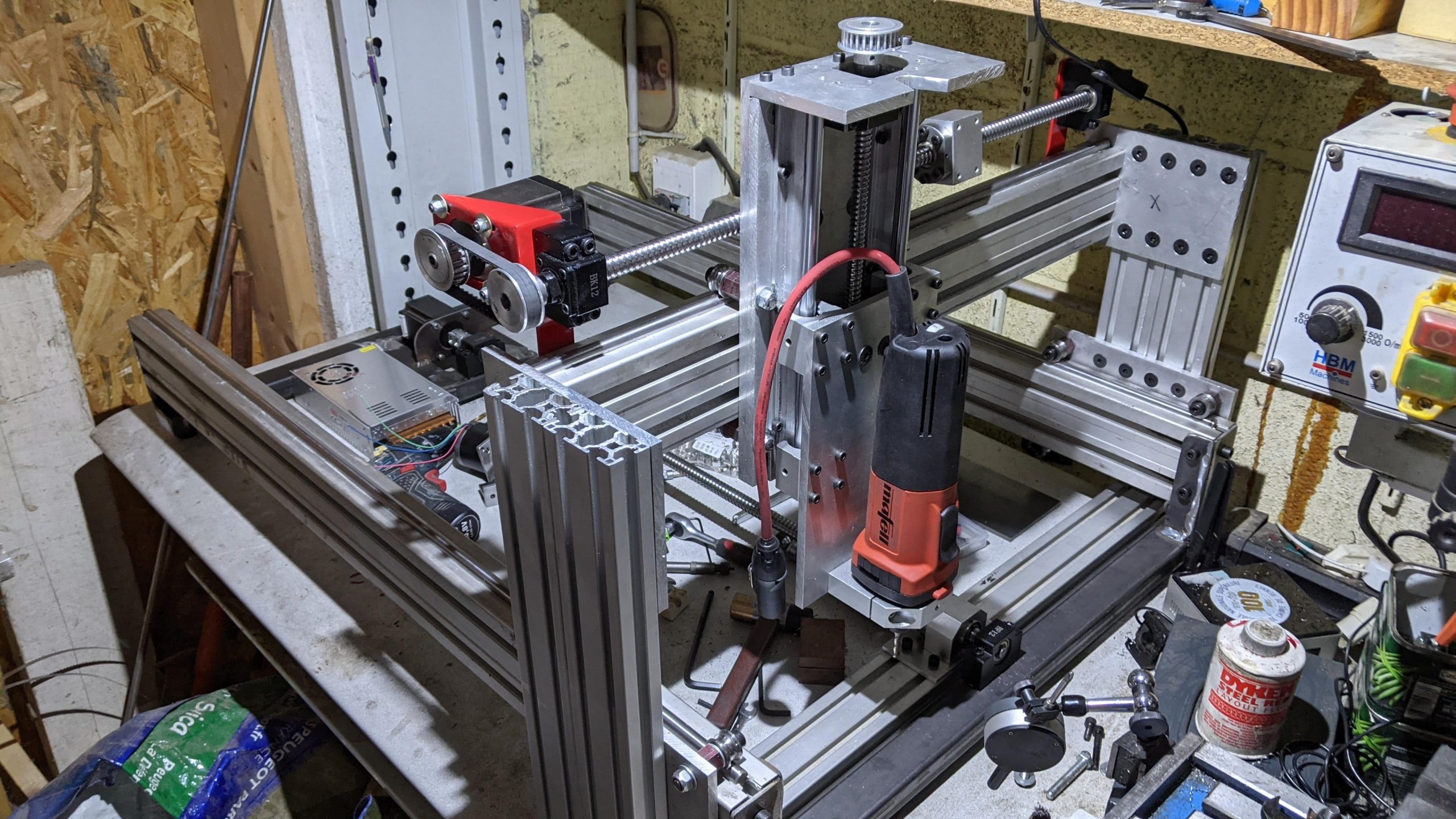
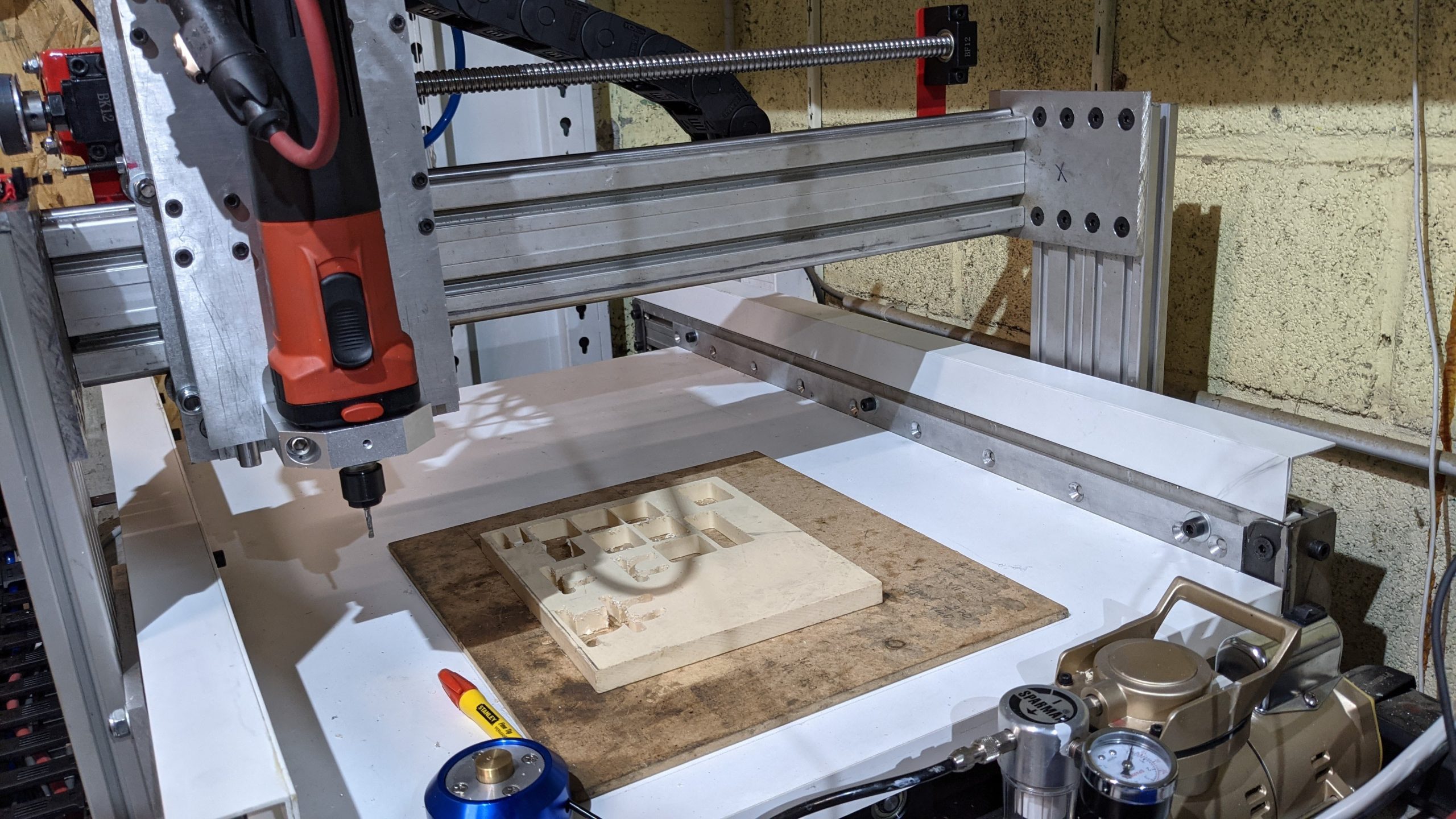
Vue globale de la machine
Je suis très content du résultat. Elle dispose d’une surface de travail de 680 mm x 450 mm ce qui est déjà très correct. Elle est suffisamment rigide pour travailler bois, plastiques, aluminium.
Le contrôle de la machine se fait avec le logiciel CNCJS installé sur un raspberry pi 3b.
Voici quelques photos des premiers projets réalisés avec
Le pilote automatique est vraiment l’ami du marin à condition de pouvoir compter sur lui dans toutes les situations.
Nous avons un pilote automatique Raymarine ST2000+ qui nous a rendu de grands services depuis 3 ans. Seulement voilà, depuis quelques temps nous constatons un jeu anormal dans le bras du pilote avec de temps en temps un cap plus qu’aléatoire…
Après un démontage rapide de la bête, nous trouvons quelques morceaux de plastique qui traînent dans le corps du pilote.
Un joint torique ( celui qui assure l’étanchéité du bras ) est cassé. Les morceaux sont tombés dans le logement du compas et en perturbent le fonctionnement. Il faut les retirer à coup de pince brucelle.
Des petits bouts de plastique noir se promènent sous l’extrémité de la vis à bille. Rien de bien encourageant…
Voilà qui explique probablement le jeu dans le bras du pilote.
Il faut démonter entièrement le pilote pour réparer les différentes pièces. D’abord la vis à bille, il y a des morceaux de plastique qui en tombent et elle a un jeu excessif. Je décide alors de prendre le risque de la démonter intégralement sans savoir si j’arriverais ensuite à remettre tous les éléments !
Je me retrouve assez vite avec la vis d’un côté et une trentaine de billes d’1mm de diamètre qui ne demandent qu’à sauter partout sur mon espace de travail.
Il faut replacer les billes sur le pas du palier en bronze en les « collant » avec de la graisse. Mais avant celà je vais usiner une bague en DELRIN pour remplacer celle qui était cassée. A priori elle servait à limiter le jeu dans la vis.
Cette baque ressemble en plus large à celle en blanc sur cet éclaté de vis à bille.
Après un tour dans LibreCad / HeeksCad me voilà en possession d’une belle bague toute simple qui rentre parfaitement dans son logement. Vive la fraiseuse numérique !
La bague est collée à la sortie du palier avec de la résine époxy.
Voilà le palier est prêt à accueillir les billes. Reste un long travail de patience ! L’intérieur du pas de vis est badigeonné de graisse silicone et les billes sont placées une à une dans leur logement. Quel travail, il me faudra pas loin de 45 min pour tout remettre en place.
Les munitions
L’arme fatale
La cible
Ça y est, la vis est remontée, elle fonctionne parfaitement.Ouf !
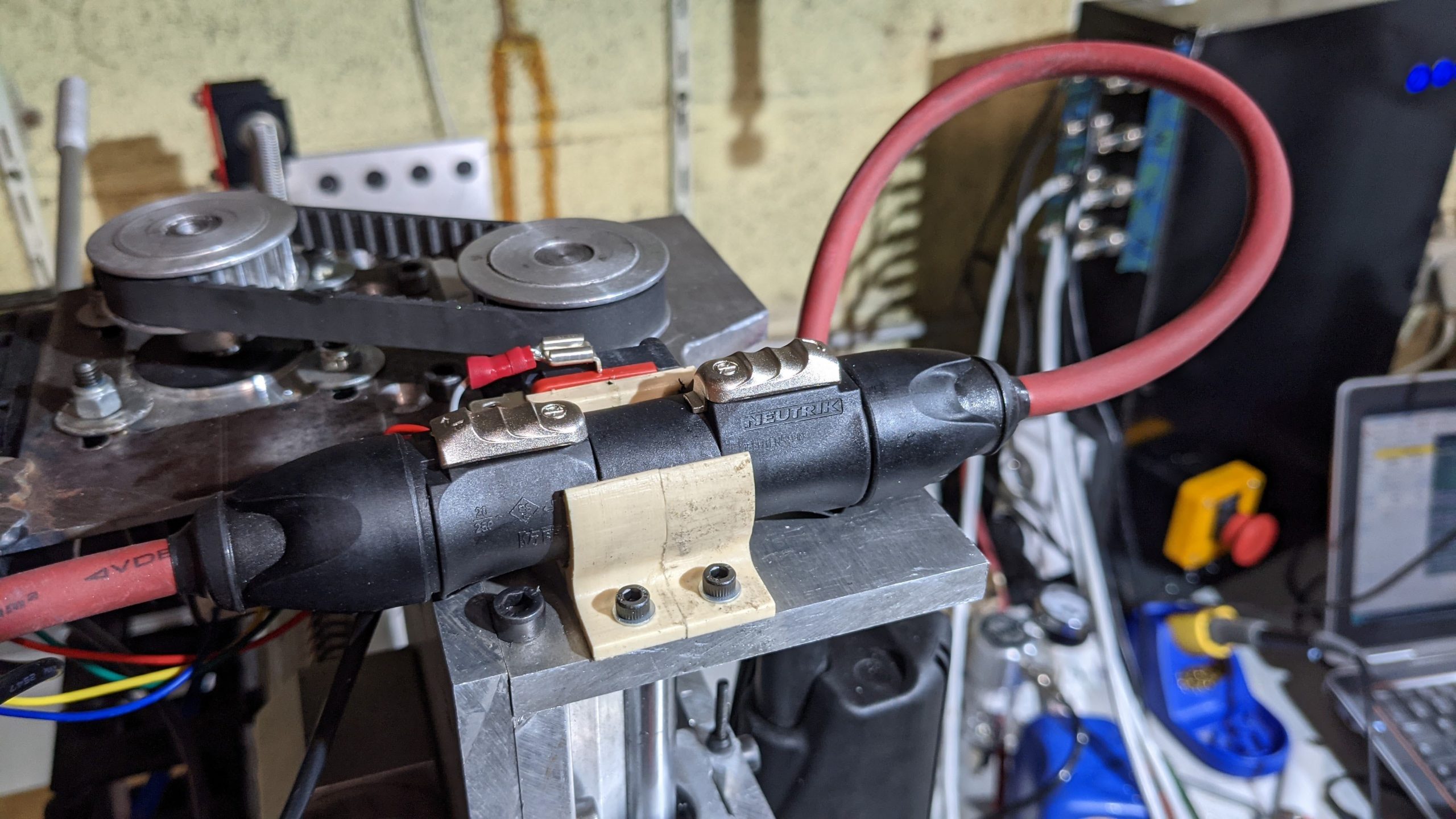
Deuxième problème, le jeu d’1cm dans la barre. En démontant la tige filetée, je vois que le support du roulement à l’extrémité de la vis est cassé. En effet, lors des virements de bord, la vis vient « taper » sur le support du roulement ce qui fini par le fracturer. Le roulement n’est plus tenu et il se promène le long de la tige. Seule la poulie à l’extrémité de la vis vient buter sur le support en aluminium et empêche la vis de sortir complètement de son logement… Je ne suis pas le seul a avoir constaté ce problème ce qui me fait penser à un défaut de conception. Dommage qu’un pilote qui n’est quand même pas donné souffre d’un problème de fragilité d’une pièce en plastique qui doit coûter quelques euros à produire !
Je vais supprimer la partie cassée pour la remplacer par une pièce en DELRIN qui sera fixée à l’aide de 2 vis sur la plaque de support en aluminium.
On voit la partie arrachée sur le support du roulement 🙁
Voilà une photo du résultat. Je n’ai pas fait de photos du remontage, j’étais pressé de tester !
La plaque en delrin fraisée pour accueillir d’un côté les glissières de la vis à bille et de l’autre le roulement de 19mm.
Encore un défaut, les support de vis cassent tous seuls sans même une intervention quelconque…
Après quelques tests tout fonctionne parfaitement. J’espère que les réparations faites seront durables et que les constructeurs prendront conscience de l’obsolescence programmée de leurs produits.