Il y a quelques temps j’avais présenté les micro controleurs Arduino, objet assez génial, pas cher ( <30€ ) avec une plateforme de développement openSource, disponible pour Linux, MacOS et Windows.
Ils ont permis d’ouvrir aux artistes, bricoleurs, enseignants, le monde des µC avec une certaine simplicité d’accès. Et bien voilà, côté développement PC, il y a aussi processing, un language tournant autour de java avec de nombreuses librairies pour faciliter les interactions avec l’utilisateur.
Les programmes compilés sont des .JAR multi plateformes qui simplifient grandement la diffusion. Il ne s’agit pas d’un language permettant de créer de grosse applications, mais plutôt de petits programmes pour un usage ciblé: reconnaissance de couleur avec une webcam, pilotage du PC avec une manette de WII…
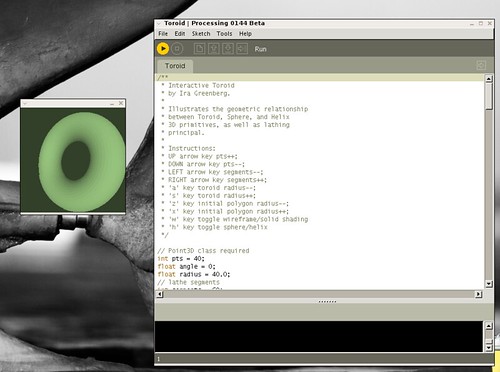
Processing est inter connectable avec un arduino, on peut ainsi agir sur le micro contrôleur depuis le PC ou bien l’inverse. De quoi ouvrir la voie à de nombreuses expérimentations: robotique, capteurs…
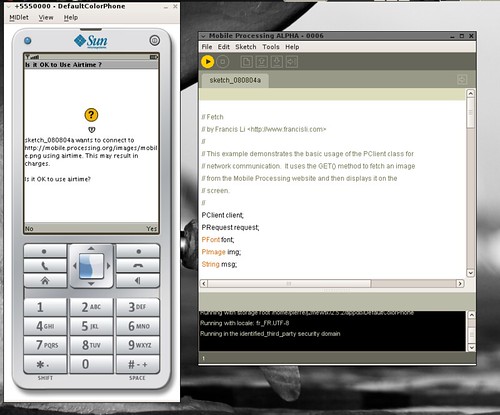
Plus récemment, un nouvel IDE est sorti, tout droit dérivé de processing. Il s’agit de Mobile, la version pour téléphones de processing.

J’ai testé, c’est impressionnant, en un rien de temps, vous pouvez sortir une application pour votre téléphone, utilisant le réseau, le bluetooth, l’affichage… La version mobile n’est livrée pour le moment que pour Windows et OsX mais une personne sur le forum propose déjà un paquet tgz pour linux 🙂
Pour finir, ceux qui veulent se lancer dans le monde de l’Arduino et du « controle des objets », peuvent regarder un ouvrage très bien chez O’reilly: « Making things talk ».
Vous pouvez acheter le bouquin ou le PDF (sans drm ) ici.
Bon développement 🙂